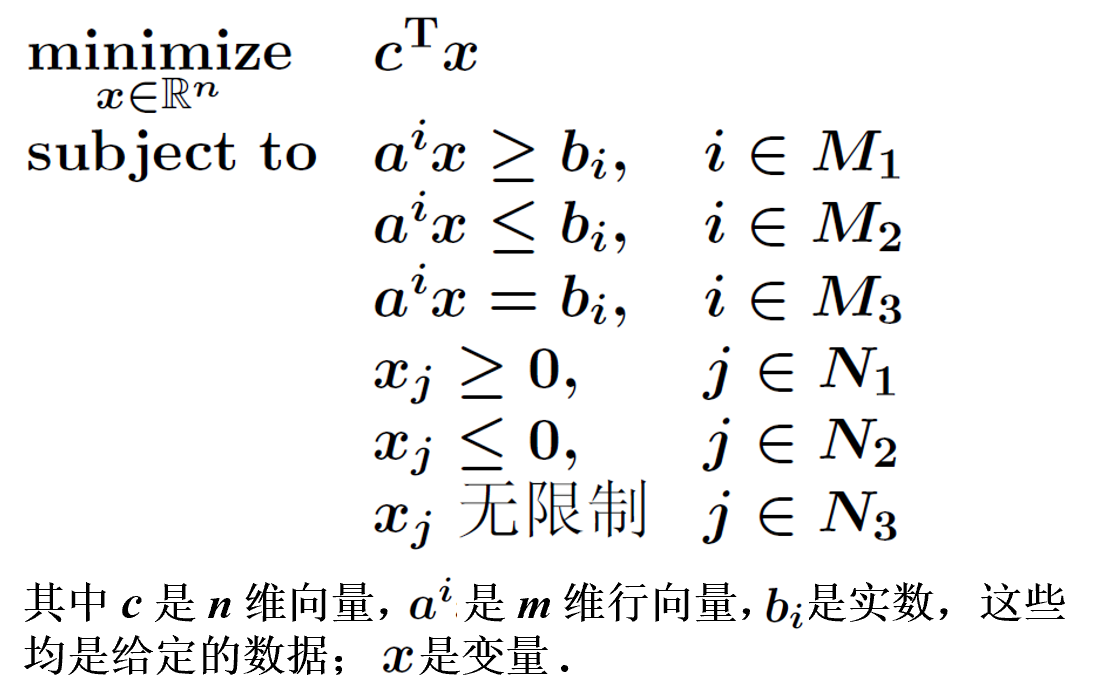
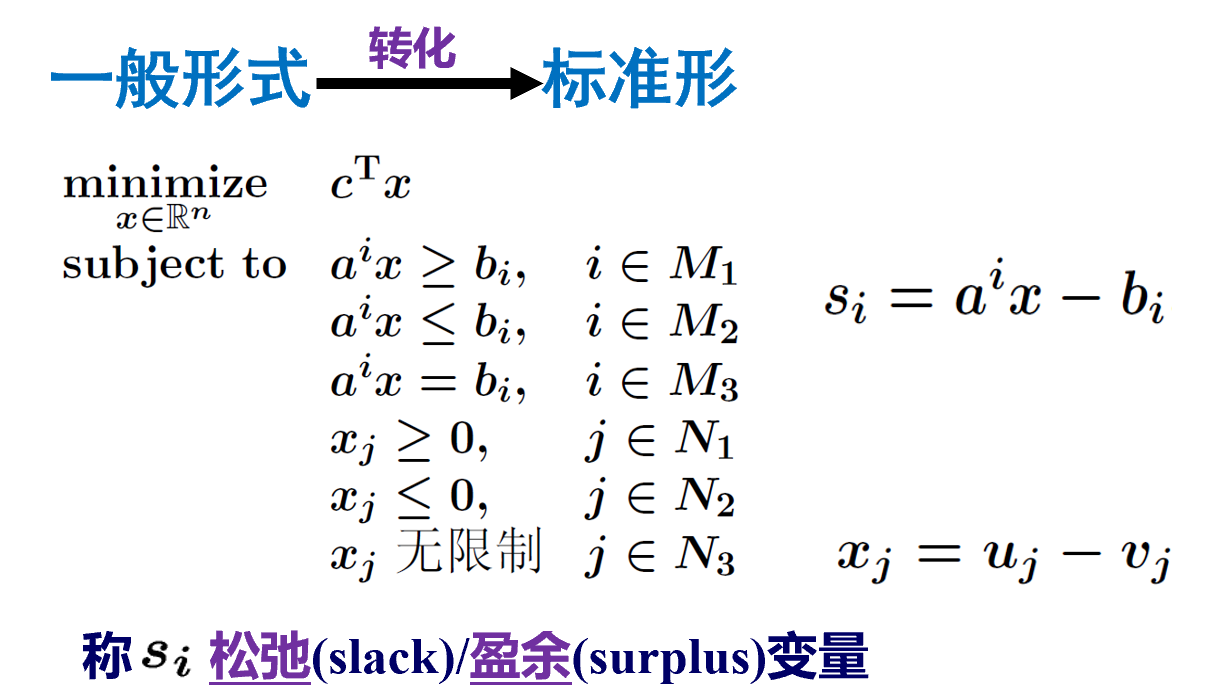
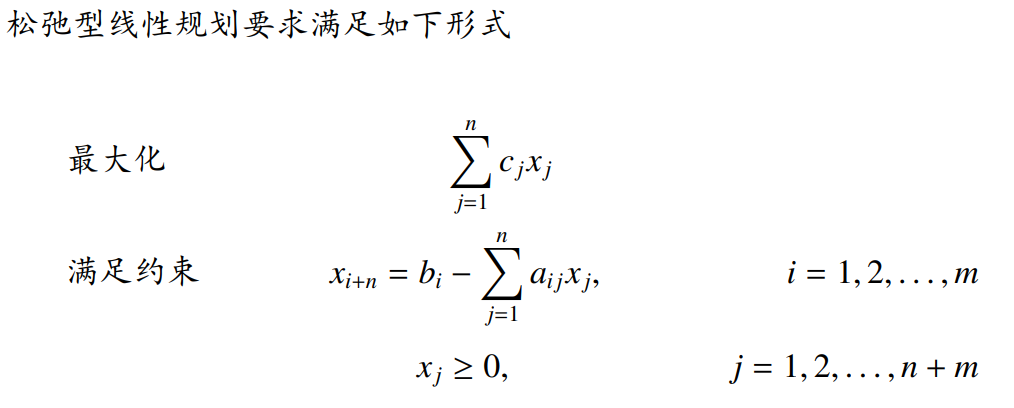
标准形的特征:极小化、等式约束、变量非负
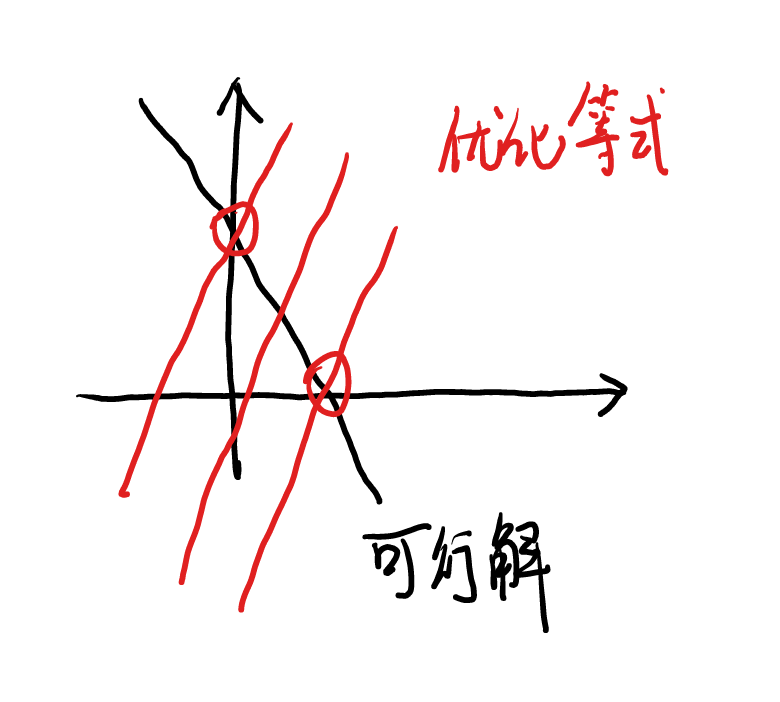
解空间是凸集,参见[[凸集]]
单纯形法的基本思想是,通过变量的代换,实现在解空间内沿着边界朝着目标函数增大的方向移动。其核心操作是转轴(pivot) 操作,即变量的代换。
定义 设 B 是 A 的m个线性无关列组成的矩阵, 置其余列所对应的变量为零,称所得方程组的解是 Ax = b 的基本解(basic solution) ;非负基本解是标准形问题的基本可行解(basic feasible solution,bfs).
称 B 是基(basis);
基本可行解的个数不超过
( n m ) \binom{n}{m}
( m n )
初始化:如何找到一个BFS?
如何直观地理解这件事情,我们考虑 m = 1 , n = 2 m=1,n=2 m = 1 , n = 2 x = 0 x=0 x = 0 y = 0 y=0 y = 0
再考虑严谨地证明这件事。
考虑具有标准形的线性规划问题,其中 A A A m m m m × n m×n m × n
考虑到任何 A A A B B B x j > 0 x_j>0 x j > 0 a j = [ k 1 , k 2 , ⋯ , k m ] B a_j=[k_1,k_2,\cdots,k_m]B a j = [ k 1 , k 2 , ⋯ , k m ] B B B B x x x
选择基变量 x B x_B x B x N x_N x N
x B = b i − ∑ i = 1 n a i j x j x_B=b_i-\sum_{i=1}^n a_{ij} x_j
x B = b i − i = 1 ∑ n a i j x j
那么:
x N = ( b i − ∑ j ≠ N a i j x j − x B ) / a i N x_N=(b_i-\sum_{j\not=N}a_{ij}x_j-x_B)/a_{iN}
x N = ( b i − j = N ∑ a i j x j − x B ) / a i N
要保证 a i N ≠ 0 a_{iN}\not=0 a i N = 0 x N x_N x N
Simplex操作即单纯形算法的主过程,从一个基本解出发,经过一系列的转轴操作,达到最优解。通过选择特定的换入变量以及换出变量,可以使得每一次转轴操作都能使目标函数增大,直到达到全局最优解。
代码如下:
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 double Simplex (Matrix<double >A,Matrix<double >b,Matrix<double >c) Matrix<double >M=addV (addH (c,Matrix <double >(1 ,1 )),addH (A,b)); int n=A.col,m=A.row; Matrix<int >isBasic (1 ,n); for (int i=n-m+1 ;i<=n;++i) isBasic (i)=true ; int last=n+1 ; while (true ){ int e=0 ; for (int i=1 ;i<=n;++i){ if (!isBasic (i)&&M[1 ][i]>0 ){ e=i; break ; } } if (e==0 ){ return -M[1 ][last]; } int pos=0 ; double min_f=0 ; for (int i=2 ;i<=m+1 ;++i){ if (M[i][e]>0 ){ if (pos==0 ||M[i][last]/M[i][e]<min_f){ pos=i; min_f=M[i][last]/M[i][e]; } } } if (pos==0 ){ return INFINITY; } else { int l=0 ; for (int i=1 ;i<=n;++i){ if (isBasic (i)&&equals (M[pos][i],1.0 )){ l=i; break ; } } isBasic (l)=false ; isBasic (e)=true ; M.times ('R' ,pos,1 /M[pos][e]); for (int i=1 ;i<=m+1 ;++i){ if (i!=pos){ M.addtimes ('R' ,pos,-M[i][e],i); } } } } }
人为增加一条从 t t t s s s
最大化 f ( t , s ) \quad f(t, s) f ( t , s )
f ( u , v ) ≤ c ( u , v ) , ( u , v ) ∈ E ∑ v f ( u , v ) = ∑ v f ( v , u ) , u ∈ V f ( u , v ) ≥ 0 , ( u , v ) ∈ E ∪ { ( t , s ) } \begin{aligned}
f(u, v) & \leq c(u, v), & (u, v) \in E \\
\sum_v f(u, v) & =\sum_v f(v, u), & u \in V \\
f(u, v) & \geq 0, & (u, v) \in E \cup\{(t, s)\}
\end{aligned}
f ( u , v ) v ∑ f ( u , v ) f ( u , v ) ≤ c ( u , v ) , = v ∑ f ( v , u ) , ≥ 0 , ( u , v ) ∈ E u ∈ V ( u , v ) ∈ E ∪ { ( t , s ) }
最小化 ∑ ( u , v ) ∈ E f ( u , v ) w ( u , v ) \quad \sum_{(u, v) \in E} f(u, v) w(u, v) ∑ ( u , v ) ∈ E f ( u , v ) w ( u , v )
f ( u , v ) ≤ c ( u , v ) , ( u , v ) ∈ E ∑ v f ( u , v ) − ∑ v f ( v , u ) = 0 , u ∈ V − { s , t } f ( u , v ) ≥ 0 , ( u , v ) ∈ E ∪ ( t , s ) \begin{array}{cr}
f(u, v) \leq c(u, v), & (u, v) \in E \\
\sum_v f(u, v)-\sum_v f(v, u)=0, & u \in V-\{s, t\} \\
f(u, v) \geq 0, & (u, v) \in E \cup(t, s)
\end{array}
f ( u , v ) ≤ c ( u , v ) , ∑ v f ( u , v ) − ∑ v f ( v , u ) = 0 , f ( u , v ) ≥ 0 , ( u , v ) ∈ E u ∈ V − { s , t } ( u , v ) ∈ E ∪ ( t , s )
最大化 0 \begin{array}{ll}\text { 最大化 } & 0\end{array} 最大化 0
∑ i f i ( u , v ) ≤ c ( u , v ) , ( u , v ) ∈ E , i = 1 , 2 … , n ∑ v f i ( u , v ) = ∑ v f i ( v , u ) , u ∈ V , i = 1 , 2 , … , n f i ( t i , s i ) ≥ d i , i = 1 , 2 , … , n f i ( u , v ) ≥ 0 , ( u , v ) ∈ E ∪ { ( t i , s i ) ∣ 1 ≤ i ≤ n } \begin{aligned}
\sum_i f_i(u, v) & \leq c(u, v), & (u, v) \in E, i=1,2 \ldots, n \\
\sum_v f_i(u, v) & =\sum_v f_i(v, u), & u \in V, i=1,2, \ldots, n \\
f_i\left(t_i, s_i\right) & \geq d_i, & i=1,2, \ldots, n \\
f_i(u, v) & \geq 0, & (u, v) \in E \cup\left\{\left(t_i, s_i\right) \mid 1 \leq i \leq n\right\}
\end{aligned}
i ∑ f i ( u , v ) v ∑ f i ( u , v ) f i ( t i , s i ) f i ( u , v ) ≤ c ( u , v ) , = v ∑ f i ( v , u ) , ≥ d i , ≥ 0 , ( u , v ) ∈ E , i = 1 , 2 … , n u ∈ V , i = 1 , 2 , … , n i = 1 , 2 , … , n ( u , v ) ∈ E ∪ { ( t i , s i ) ∣ 1 ≤ i ≤ n }
判断是否可行。
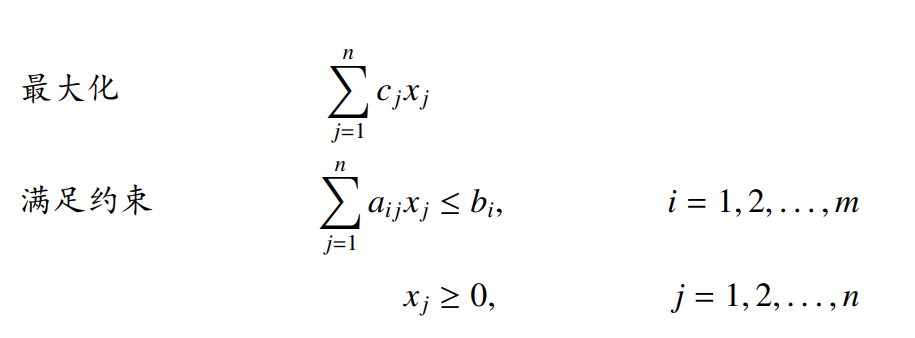
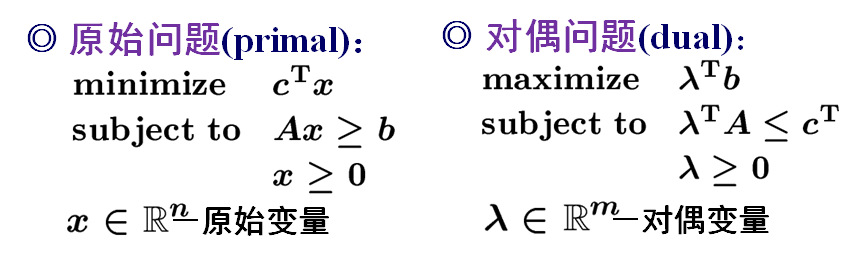
给定一个原始线性规划:∑ j = 1 n c j x j \quad \sum_{j=1}^n c_j x_j ∑ j = 1 n c j x j ∑ j = 1 n a i j x j ≥ b i , i = 1 , 2 , … , m \quad \sum_{j=1}^n a_{i j} x_j \geq b_i, \quad i=1,2, \ldots, m ∑ j = 1 n a i j x j ≥ b i , i = 1 , 2 , … , m
x j ≥ 0 , j = 1 , 2 , … , n x_j \geq 0, \quad j=1,2, \ldots, n
x j ≥ 0 , j = 1 , 2 , … , n
定义它的对偶线性规划为:∑ i = 1 m b i y i \quad \sum_{i=1}^m b_i y_i ∑ i = 1 m b i y i ∑ i = 1 m a i j y i ≤ c j , j = 1 , 2 , … , n \quad \sum_{i=1}^m a_{i j} y_i \leq c_j, \quad j=1,2, \ldots, n ∑ i = 1 m a i j y i ≤ c j , j = 1 , 2 , … , n
y i ≥ 0 , i = 1 , 2 , … , m y_i \geq 0, \quad i=1,2, \ldots, m
y i ≥ 0 , i = 1 , 2 , … , m
用矩阵可以更形象地表示为:c T x \quad \mathbf{c}^T \mathbf{x} \quad c T x b T y \quad \mathbf{b}^T \mathbf{y} b T y A x ≥ b A \mathbf{x} \geq \mathbf{b} A x ≥ b A T y ≤ c A^T \mathbf{y} \leq \mathbf{c} A T y ≤ c
x ≥ 0 y ≥ 0 \mathbf{x} \geq 0 \quad \mathbf{y} \geq 0
x ≥ 0 y ≥ 0
定理6.2. (线性规划对偶性) 若 x ∗ = ( x 1 ∗ , … , x n ∗ ) \mathbf{x}^*=\left(x_1^*, \ldots, x_n^*\right) x ∗ = ( x 1 ∗ , … , x n ∗ ) y ∗ = ( y 1 ∗ , … , y m ∗ ) \mathbf{y}^*=\left(y_1^*, \ldots, y_m^*\right) y ∗ = ( y 1 ∗ , … , y m ∗ )
∑ j = 1 n c j x j ∗ = ∑ i = 1 m b i y i ∗ \sum_{j=1}^n c_j x_j^*=\sum_{i=1}^m b_i y_i^*
j = 1 ∑ n c j x j ∗ = i = 1 ∑ m b i y i ∗
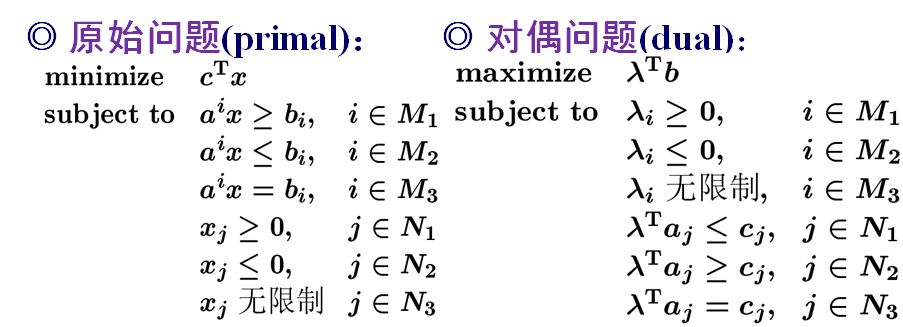
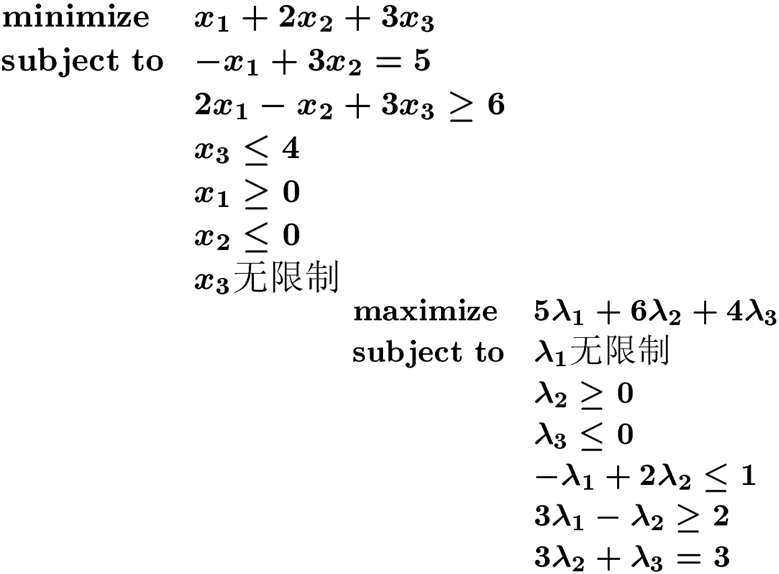
一个等式约束在对偶后得到一个无限制的变量。