基本概念
参考系
用来描述物体运动而选作参考的物体、或相对静止的物体系。运动的相对性决定描述物体运动必须选取参考系。
坐标系
坐标系为参考系的数学抽象。由固结在参考系上的一组有刻度的射线、曲线或角度表示。坐标系可任选,以描述方便为原则。
- 直角坐标系 (x,y,z)
- 球坐标系 (r,θ,φ)
- 柱坐标系 (ρ,θ,z)
- 自然坐标系
质点位置、速度、加速度的描述
质点:物体的大小、形状可以忽略;运动过程中,物体的各部分运动相同。
平均速度:
v=ΔtΔr
瞬时速度:
v=Δt→0limΔtΔr=dtdr
速度大小与速率相等,怎么证明?利用 limΔt→0Δs=limΔt→0∣Δr∣。
直角坐标系
位矢
r=xi+yj+zk
经常考参数方程参数的消去,得到 x,y,z 满足的方程。
速度
v= dtdr= dtdxi+ dtdyj+ dtdzkv=vxi+vyj+vzk⇒vx= dtdx, etc. ∫tAtBvx dt=∫tAtB dtdx dt=∫xAxB dx=xB−xA
速率: v=∣v∣=vx2+vy2+vz2
代表对每个分量进行分析。
加速度
加速度的表达形式:
a=dtdv=dt2d2r
转换技巧(如果只考虑一维):
a=dxdvdtdx=dxdvv=dxd(21v2)
这样,知道 a 和 x 的关系,也可以推出 v 的方程。例如:
跳水运动员自 10 m 跳台自由下落, 入水后因受水的阻碍而减速, 设加速度 a=−kv2, k=0.4 m−1. 求运动员速度减为入水速度 10% 时的入水深度.
解: 取坚直向下为 x 轴, a=−kv2= dxdv dtdx=v dxdv, 所以 x=k1lnvv0. 将 v=0.1v0 代入, 解得x=k1ln10=5.76 m.
分离变量的做法:
axdx=vxdvx
积分得到
ax(x)=vx(x)=dtdx
继续积分,得到
∫dt=∫vx(x)dx
因此,可以得到 t 与 x 的关系。
a= dtdv⇒ax= dtdvxi+ dtdvyj+ dtdvzk= dt2d2xi+ dt2d2yj+ dt2d2zk=axi+ayj+azk= dtdvx= dt2d2x, etc.
**自然坐标系
速度
考虑某一个点的运动,会出现切向 τ 和法向 n。切向指向某点的运动方向。
v=vτ=v⋅eτ
加速度
a=an+aτ
其中
an=ρv2ρ=∣y′′∣(1+y′2)3/2
aτ=dtdv
推导:
a=dtd(etv)=dtdvet+dtdetv=dtdvet+vdtdθen
注意两个单位向量之间的关系。dtdet=dtdθen。
对后面一项进一步变形,很多情况,曲线运动的时候我们不知道角速度 dtdθ 是什么,因此需要进一步推导:
dtdθ=dsdθdtds
后面一项为速度,前一项只与曲线的形状有关。
定义 曲率:
k=dsdθ=Δt→0limΔsΔθ
定义 曲率半径:
ρ=k1
推出,dtdθ=dsdθdtds=ρv,
a=dtdvet+vdtdθen=dtdvet+ρv2en
其中,
at=dtdv=dt2d2s
反应速度大小的变化,朝向切向。
an=ρv2
反应速度方向的变化。
圆周运动(自然坐标系)
此时,曲率半径 ρ=R,得到,
a=Rβet+Rω2en
at=dtdv=dtd(Rω)=Rβ
an=ρv2=Rω2
角速度、角加速度。
注意,at=0 不意味着加速度为 0,还要考虑 an。匀速圆周运动 β=0。
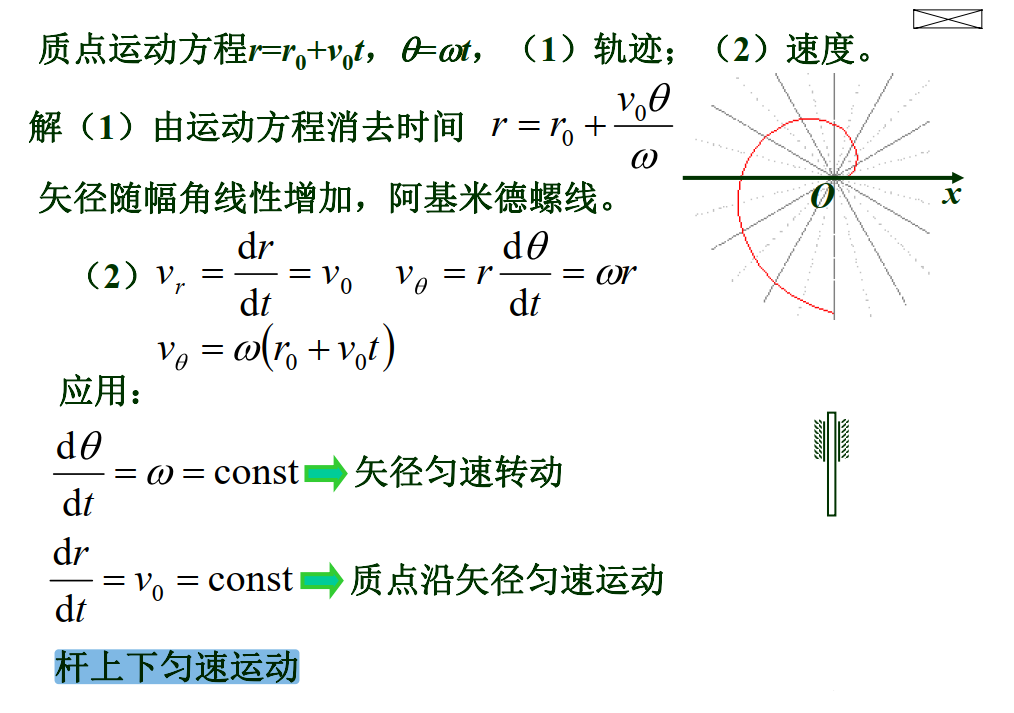
**极坐标系
位置
er:径向单位矢量(沿着 r)
eθ:横向单位矢量(和 r 垂直)
位置矢量的表示:
r=rerr=r(t)=r(t)er(t)
两个量都随着时间变化(两个自由度)
速度
v=dtd(err)=dtdrer+rdtdθeθ
径向速度:
vr=dtdr
横向速度:
vθ=rdtdθ=rω
加速度
er 径向方向。eθ 横向方向。
回顾:
v=dtdrer+rdtdθeθ
第一项求导:
dt2d2rer+dtdrdtder
而 dtder 代表径向方向的变化,得到:
dtder=dtdθeθ
第二项求导:
dtdrdtdθeθ+rdt2d2θeθ+rdtdθdtdeθ
而 dtdeθ 代表横向方向的变化,得到:
dtdeθ=−dtdθer
而方向相反,因为是指向中心的。
因此:
ar=dt2d2r−r(dtdθ)2=r¨−rω2
aθ=rdt2d2θ+2dtdrdtdθ=rθ¨+2r˙ω
运动方程与轨道
r=r(t)r(t)=x(t)i+y(t)j+z(t)k
分量形式:
⎩⎪⎨⎪⎧x=x(t)y=y(t)z=z(t)
消掉时间参量,如
{x=rcosωty=rsinωt
得到
x2+y2=r2
得到了运动的轨道(方程)

位移
Δr=rB−rAΔr=Δxi+Δyj+Δzk
位移具有 矢量叠加性质。
位移与路程 Δs 不同。
- 位移为矢量,路程为标量
- Δs=∣Δr∣ 只有当 Δt→0 时。
∫ABds=∫AB∣dr∣∫ABdr=rB−rA=Δr∫ABdr=∫ABd∣r∣=∣rB∣−∣rA∣=Δr
- 表现了 Δs=∣Δr∣ 只有当 Δt→0 时。
- 矢量首尾相连。
- 路程的变化量相加。Δr=∣rB∣−∣rA∣
在实际算路程的过程中,利用 (1) 式,我们分别计算位移朝向相同的部分,以速度为 0 的点为分段点,取绝对值加起来即为路程。例如:
有一质点沿 x 轴做直线运动, t 时刻的坐标为 x=4.5t2−2t3. 试求:
(1) 第 2 秒内的平均速度;
(2) 第 2 秒末的瞬时速度;
(3) 第 2 秒内的路程.
解:
(1) 平均速度 vˉ=Δtx(t=2)−x(t=1)=12−2.5=−0.5 m/s.
(2) 第 2 秒末的瞬时速度 v= dtdx∣∣t=2=(9t−6t2)∣∣t=2=−6 m/s.
(3) 当速度为 0 时, 即 9t−6t2=0, 解得 t1=0 s,t2=1.5 s, 以 1.5 s 作为分段点, 路程 s=∣∣x(t=1.5)−x(t=1)∣∣+∣∣x(t=1.5)−x(t=2)∣∣=∣∣827−25∣∣+∣∣827−2∣∣=2.25 m.
相对运动
是对位置矢量描述的相对性。
r=r′+R
其中 R 是从 S 坐标系原点到 S′ 坐标系原点的位置矢量。即 S′ 原点在 S 坐标系中的位置矢量。是空间测量的绝对性。
但是在 S 坐标系和 S′ 坐标系中的测量可能不一样,例如时间、空间。设 S′ 时间是 t′。如果能够保证 Δt=Δt′
dt=ΔtΔt→0dtdr=dtdR+dtdr′=dtdR+dt′dr′v=v′+ua=a′+dtdu
u 牵连速度,du/dt 牵连加速度。绝对=相对+牵连。
⎩⎪⎪⎨⎪⎪⎧x=x′+uty=y′z=z′t=t′
参考系的转动
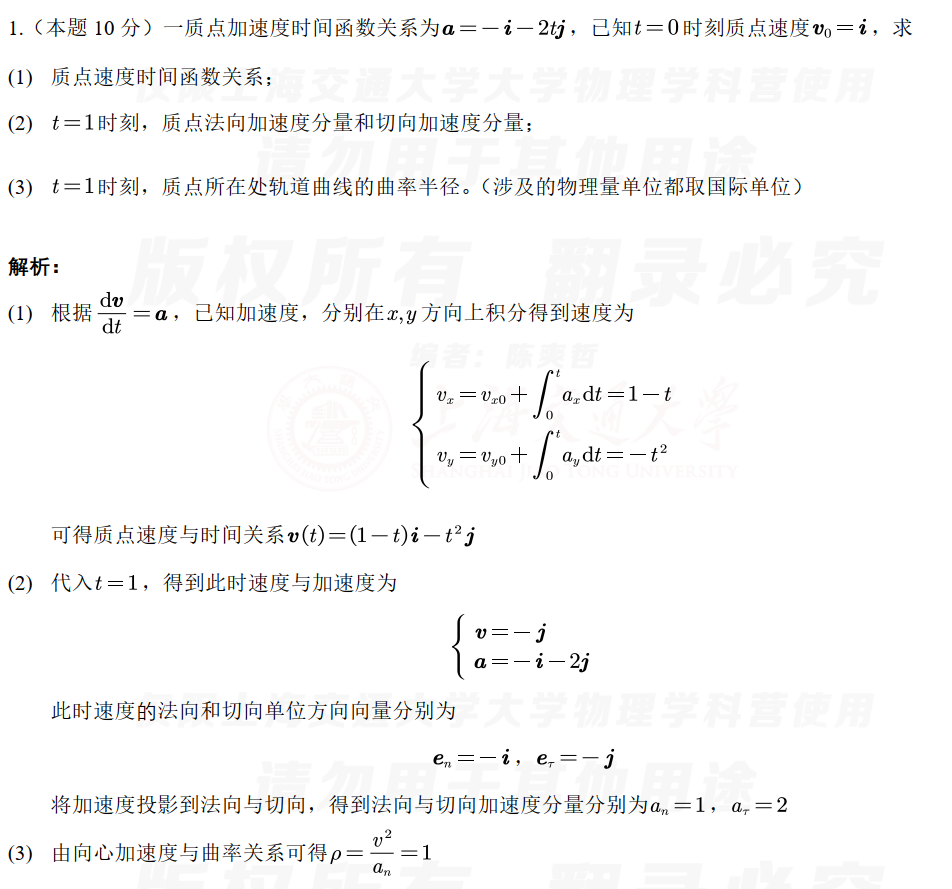
综合例题
描述质点运动的物理量有位矢、位移、速度和加速度等,而质点在某时刻的运动状态主要由位置和速度所确定,因此通常所说质点运动状态指的是它的位矢和速度确定的状况。
常见的解题方法
- 套公式、求导。明确每个物理量的含义。
- 用相对牵连关系或者运动的合成分解。
加速度、速度的求法
r=r0+∫t0tvdt
v=v0+∫t0tadt
初值问题。
路程的求法
本质上是高数的曲线求和。
∫s0sds=∫s0s(dx)2+(dy)2=∫s0s1+(dydx)2dy
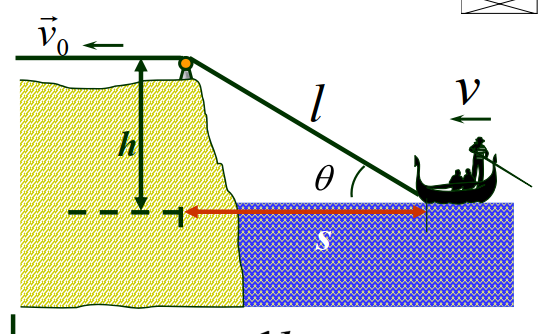
速度:
几何关系:
l2=h2+s2
对时间进行求导,得
2dtdll=2dtdss
由于 v=−ds/dt,v0=−dl/dt,可以发现
v0l=vs,v=slv0
也可以将 v 分解为沿绳方向和垂直绳方向。得到 vcosθ=v0,v=cosθv0。
加速度:
可以使用第一个表达式:
a=dtdv=v0(s2dtsdl−lds)=v0(−s1v0+s2lv)=v0(−s1v0+s3l2v0)=v02s3h2
也可以使用带角度的表达式:
a=v0dtdcosθ1=v0cos2θ−1(−sinθ)dtdθ
切向速度为 vsinθ,半径为 l,dtdθ 可以使用 vsinθ/l 计算,因此:
a=s3v02h2
用相对运动的观点。
v=vr+vθ
得到
vcosθ=vr⇒v=cosθvr=cosθv0=slv0
a=ar+aθ
ar=r¨−rω2=0−r(lvθ)2=s2lh2
acosθ=ar⇒a=cosθar=s3v02h2

利用相对运动。在圆柱面上看,P 的方向沿切向,因此
vp=v′+v
得到
vp=vtanθv′=v/cosθ
要求出 ap 需要对 vp 求导:
ap=atanθ+vdθdtanθdtdθ=atanθ+vsec2θ(−Rcosθv)
直观上来说,θ 应该是减小的,所以 dθ/dt 应该取负值。
或者,利用相对运动,在圆柱面上看,P 的速度方向沿切向,加速度方向有沿着切向和沿着法向的,设为 aτ,an,在地面上看,应该是两者加速度的叠加
aP=aτ+an+a
然后投影即可。

一质点在平面直角坐标系内运动,在位置 (x,y) 处的速度 v=vxi+vyj,加速度 a=axi+ayj。
v2=vx2+vy2
at 为 axi 在其方向上的投影与 ayj 在其方向上的投影之和。
∣at∣=axvvx+ayvvy
由 a2=at2+an2=ax2+ay2(选取的坐标系不同)
得到
∣an∣=∣∣∣∣vaxvy−ayvx∣∣∣∣
事实上:
[atan]=[cosθ−sinθsinθcosθ][axay]
其中 θ 代表 x 方向与 t 方向的夹角,代表旋转 −θ 角度,改变坐标系。
已知运动方程
{x=2ty=6−2t2
求 an,at。
利用好
⎩⎨⎧at=dtdvan=ρv2at2+an2=a2
v=dtdr=2i−4tj
得到
v=∣v∣=21+4t2
得到
∣at∣=1+4t28t
为了避免求 ρ,我们采用第三个公式。
a=dtdv=−4j
推出
∣an∣=1+4t24
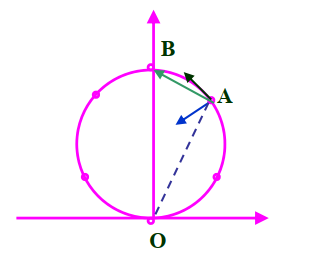
T=6s,R=3m 走完一周,t=0 时质点在 O 处,t=2s 时?
ω=T2π=3π
r=(0,3)+3(sinωt,−cosωt)
dtdr∣t=2s=v3ω(cosωt,sinωt)=(−2π,23π)
dtdv=3ω2(−sinωt,cosωt)
dtdv=0
匀速圆周运动。
∫ABdr=rB−rA
∫ABd∣r∣=∣rB∣−∣rA∣
∫AB∣dr∣=sAB
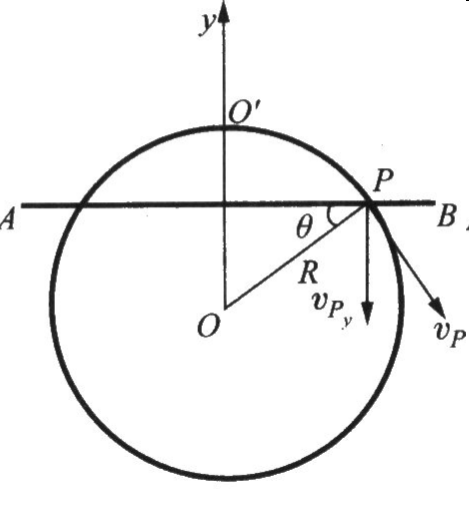
半径为 R 的圆固定在竖直平面内,水平直棒 AB 位于同一平面,从固定圆的最高点 O′ 由静止开始自由下落,如图所示。求:当直棒 AB下 落到离圆心 O 距离为 R/2 时,直棒与此圆交点 P 的速率、切向加速度分量和法向加速度分量。
P 是一个几何点而不是质点,轨迹在圆周上运动。
当距离 R/2 时
vPy=2gh=2g2R=gR
P 的速度可以分解为垂直于杆方向和沿杆方向,而垂直于杆方向就是 vPy,因此。
vpcosθ=vPy
得到
vp=cosθvPy=2gR/3
法向加速度使用切向速度和半径计算:
an=RvP2=34g
根据线性代数的观点,为了计算 at,我们既可以运用两者模长平方的关系,也可以利用某个分量上的关系。
ay=−g,ax 未知,但是没有关系,我们已经可以通过投影的方式解出 at。
ansinθ+atcosθ=g
得到
at=cosθg−ansinθ=923g
1
2
3
| from sympy import *
from sympy.matrices import zeros
import sympy
|
1
2
| g,t,R = sympy.symbols('g t R')
v_p_y = g*t
|
1
2
| theta = asin((R-1/2 * g * t**2)/R)
theta
|
asin(RR−0.5gt2)
1
2
| v_p = v_p_y/cos(theta)
simplify(v_p)
|
1−R2(R−0.5gt2)2gt
1
2
| a_n=v_p**2/R
simplify(a_n)
|
1.0R−0.25gt21.0Rg
1
2
| a_t=(g-a_n*sin(theta))/cos(theta)
simplify(a_t)
|
R2gt2⋅(1.0R−0.25gt2)⋅(1.0R−0.25gt2)0.25g2t2

v=(v1−v2tanθ)i−v2j
a=dtdv=−v2dθdtanθ⋅dtdθi=−v2cos2θ1⋅Rdtds=−cos3θv22

一质点以初速 v0在与水平成仰角 θ0 角的方向被抛出,忽略空气阻力,求质点在时刻 t 的切向和法向加速度及曲率半径 ρ。
1
| g,t,R,theta_0,v_0 = sympy.symbols('g t R theta_0 v_0')
|
1
2
| v_x=v_0*cos(theta_0)
v_y=v_0*sin(theta_0)-g*t
|
1
2
| v=sqrt(v_x**2+v_y**2)
v.simplify()
|
g2t2−2gtv0sin(θ0)+v02
1
2
| a_n=g*cos(theta)
a_n.simplify()
|
g2t2−2gtv0sin(θ0)+v02gv0cos(θ0)
1
2
| a_t=-g*sin(theta)
a_t.simplify()
|
−gg2t2−2gtv0sin(θ0)+v02(gt−v0sin(θ0))2
1
2
| rho=v**2/a_n
rho.simplify()
|
gv0cos(θ0)(g2t2−2gtv0sin(θ0)+v02)23
设某一质点以初速度 v0=100i (m⋅s−1) 做直线运动,其加速度为 a=−10vi (m⋅s−1)。 问:质点在停止运动之前运动的路程有多长?
第一种方法,得到 v 与 t 的关系,积分得到运动路程。
第二种方法,得到 v 与 s 的关系,直接得到路程:
a=dtdv=dsdv⋅dtds=−10v⇒∫0sds=−101∫1000dv



习题
1-16

速度、加速度的合成。
1-22

既有切向加速度,又有法向加速度。
**1-24


数学法爆算:
sinθ=lRsin(θ+dθ)=l−vdtR
推出
=0sinθcosdθ−sinθ+dθsindθcosθ=Rl2vdt
也可以得到
ω=dtdθ=Rl2cosθv=Rcosθvsin2θ
1-26


1-48

