质心、运动定理
体系、动量定理
刚体、简谐振动
刚体运动的描述
刚体的定义
任何情况下形状和体积都不改变的物体(理想化的模型)刚体是特殊的质点系,其上各质元间的相对位置不改变。
自由度
完全描述运动所需的独立坐标数。
- 质点的直线运动,自由度 =1。
- 质点的一般运动,自由度 =3。
- N 个质点的一般运动,自由度 =3N。
- 刚体,需要确定三个点。第一个点 3 个自由度,第二个点间距确定,形成一个球面,两个自由度,第三个点轨迹形成一个圆,一个自由度。因此需要 6 个自由度。
刚体的运动形式
- 平动 (translation) 三个自由度。
- 转动 (rotation) 定轴转动、定点转动
- 定轴转动 运动过程中各质元均做圆周运动,中心都在一条固定的直线(转轴上)。一个自由度,选定参考方向,利用夹角 θ 即可确定刚体的位置。
- 定点转动 转轴方向两个自由度,转轴角度一个自由度。
- 平面平行运动 分解为平动 (2)+转动 (1) 类似于平面上的陀螺。汽车里的行星齿轮。
- 一般运动 6 个自由度。
处理定轴转动的物理基础:
M=dtdL
刚体的定轴转动定理
刚体所受的力矩 只有垂直于转轴的外力分量才会产生沿转轴方向的力矩 Mz,而平行于转轴的外力分量会被抵消,为 0。
设第 i 个质元受外力 Fi,并且假定 Fi 垂直于转轴,得到刚体所受的关于定轴的合力矩:
Mz=i∑Miz=i∑riFisinθi
刚体定轴转动的角动量
L=i∑Li=i∑(Ri×Δmivi)
得到
Li=Ri⋅Δmivi⇒Liz=Lisinφi=Ri⋅Δmivisinφ1=ri⋅Δmivi
对整个刚体:
Lz=i∑Liz=i∑riΔmivi=(i∑Δmiri2)ωJ:=i∑Δmiri2称为刚体对转轴z的转动惯量
Lz=Jω
称为刚体对转轴 z 的角动量。
刚体定轴转动定律
由质点系的角动量定理,
M=dtdL
对刚体的定轴转动,有
Mz=dtdLz
得到
M=dtd(Jω)=Jdtdω=Jα
∫t0tMdt=Jω−J0ω0
称为角冲量。
阿特伍德机
整体的角动量
(m1g−m2g)R=dtd(L1+L2+L3)=dtd(m1vR+m2vR+Jω)=m1Ra+m2Ra+JβRa
得到了 a。
当 m1=m2 ,角动量守恒。假设滑轮向 1 物体的方向转动,那么
m2v2+(−m1v1−Jω)=0
打击中心问题
质心运动定律分量式:
⎩⎪⎪⎪⎨⎪⎪⎪⎧Ft=F+Nx=mact=m(2lα)Fn=Ny−mg=macn=m(2lω2)≈0
而 α=M/J,得到 M=Fl0,J=31ml2,因此
Nx=2ml31ml2Fl0−F=(2l3l0−1)F
当 l0<32l 时,Nx<0。
当 l0=32l 时,Nx=0。
当 l0>32l,Nx=0。
打击中心:使得支反力为 0。如果在打击中心,可以用水平方向动量守恒。

取质元为圆环,则
dm=σ⋅dS=πR2m⋅2πrdr
质元所受摩擦为:
df=−μdmg
那么总体摩擦力的力矩为:
M=∫0Rrdf=32μmgR
经过多少时间停止:因为 M 是常数。
t=JM=3R4μg
转过的角度:
α=ω0/tφ=ω0−21αt2=8μg3Rω02


刚体的转动惯量
定义
J:=i∑Δmiri2J:=∫r2dm
其中 ri 是 Δmi 到转轴的垂直距离。
刚体为分立的质点组成时,用求和,为质量连续体时,用积分。
可以看出,刚体的转动惯量只和刚体本身的性质和转轴的位置有关。
均匀圆环
J==∫r2dm∫R2dm=mR2
均匀圆盘
Jc=∫r2dm=∫r2(面密度σ增加dr的面积dS)=∫0Rr2σ(2πrdr)=∫0R2σπr3dr=2πσ4R4=2πR2σ2R2=21mR2
均匀细棒绕中心
利用
dm=lmdx
得到
J=∫dm到转轴的垂直距离x2dm=∫2−l2llmx2dx=121ml2
问:
- 如果前面是 l/3 后面是 2l/3,改变积分上下限。
- 如果是斜着摆放,和转轴夹角为 θ,改变 r2=x2sin2θ。
均匀细棒绕一端
积分下限变为 0,积分上限为 l,得到
J=∫0llmx2dx=31ml2
均匀球体对直径的转动惯量
分解为若干圆盘。
利用圆盘转动惯量的公式,代入
ρ=34πR3m
J=21mR2=21ρVR2
dJ=21ρπ(Rsinθ)2dz(Rsinθ)2
想要找到 dz 和 dθ 的关系,得到
z=Rcosθ
两边求微分,得到
dz=Rd(cosθ)
因此,整体进行积分,得到
J=∫dJ=21ρπR5∫0π(sinθ)4d(cosθ)=21ρπR5∫0π(cos4θ−2cos2θ+1)d(cosθ)=21ρπR5(51t5−32t3+t)∣∣∣∣−11=52mR2
也可以使用球面坐标变换。
圆环以直径为轴
21mR2
圆盘以直径为轴
41mR2
平行轴定理
刚体对任一转轴的转动惯量 J 等于对通过质心的平行转轴的转动惯量 Jc 加上刚体质量 m 乘以两平行转轴间距离 d 的平方。
J=Jc+md2
证明:
J=i∑Δmirio′2=i∑Δmiric2+md2−2di∑Δmiric=Jc+md2

垂直轴定理
垂直轴定理只适用于薄板
Jz=i∑Δmiri2=i∑Δmi(xi2+yi2)=Jy+Jx
可以算出圆盘以直径为轴的转动惯量。

可以看为二维的棒,只不过 x 轴方向拉长了。

M=Jdtdω
mg6lcosθ=91ml2dtdω
进行替换,得到
ω=dtdθ⇒dt=ωdθ
得到
∫0ωωdω=∫02π2l3gcosθdθ

刚体定轴转动的角动量守恒定律
M=dtd(Jω)
当 M=0 时,有
dtd(Jω)=0
即 Jω=J0ω0=const。
定轴转动角动量守恒定律:刚体在定轴转动中,当对转轴的合外力矩为零时,刚体对转轴的角动量保持不变。
适用于刚体,非刚体和物体系。
角动量守恒的情况。
- 力过转轴。
- 力矩均不相等,但是可以抵消。
角动量守恒的情况
- J,ω 都不变,所以 L=Jω=const。
- J,ω 都变化,但是为常数,如花样滑冰。
- 刚体组角动量守恒。若刚体由几部分组成,且绕同一轴转动。
刚体(J 不变)的角动量守恒 如直立旋转陀螺不倒。
非刚体(J 可变)的角动量守恒 如芭蕾舞。
物体系的角动量守恒
若系统由几个物体组成,当系统受到的外力对轴的力矩的矢量和为零,则系统(对共同转轴)的总角动量守恒: (角动量可在刚体组内部通过内力作用传递)
i∑Jiωi=const
如:直升机机尾加侧向旋叶,是为防止机身的反转。

系统角动量守恒,得到
J0ω0=Jω
其中转动惯量
J0=21m1R2J=J0+m2(ut)2
得到
ω=1+m1R22m2u2t2ω0
转过角度需要积分:
φ=∫0t0ωdt



利用系统角动量守恒,得到
mv032l=−m2v032l+m(32l)2ω+2m(3l)2ω

m2vl=31m1l2⋅ω−m2v′l
角动量守恒,但是系统总动量不守恒。
刚体定轴转动的功能原理
刚体定轴转动的转动动能
Ek=i∑21Δmivi2=21i∑Δmiri2ω2=21Jω2
由平行轴定理,可以分解为刚体绕过质心轴转动和随质心的平动。
Ek=21Jcω2+21mvc2
力矩的功
A=∫φ0φMdφ
类似于
A=∫l0lFdl
力矩的功率
功率 P=Fv=Mω。
刚体定轴转动的动能定理
M=Jdtdω=Jdφdωdtdφ=Jωdφdω
刚体的重力势能
Ep=mgzc
刚体定轴转动的功能原理
∫φ0φMdφ=(mgzc+21Jω2)−(mgzc0+21Jω02)
设电风扇的功率 P 恒定不变,风叶受到的空气阻力矩与风叶旋转的角速度 ω 成正比,比例系数为 k,并已知风叶转子的总转动惯量为 J,求:
-
原来静止的电风扇通电后 t 秒时刻的角速度。
阻力矩:−kω.
M=Jdtdω=ωP−kω
得到
P−kω2ωdω=J1dt
也就是
P−kω2d(P−kω2)=−J2kdt
得到
(ln(P−kω2))∣∣0ω=(−kt/J)∣0t
得到
ω=kP(1−e−kt/J)
-
电风扇稳定转动时的角速度:
可以令 t→∞. 得到 ω=P/k
时间常数 τ0=J/k,需要到 5τ0.
均匀细棒 m,l,水平轴 O,开始棒水平,由静止释放,求:
-
水平位置放手时,棒的质心加速度。
重力作用于质心,得到
α=JMz=2l3g
act=2lα=43gacn=0
-
摆到竖直位置时,棒的角速度。
利用机械能守恒,得到
21Jω2−mg2l=0
得到
ω=l3g
-
摆到竖直位置时,轴的支反力。
得到
acn=2lω2Fy=mg+macn
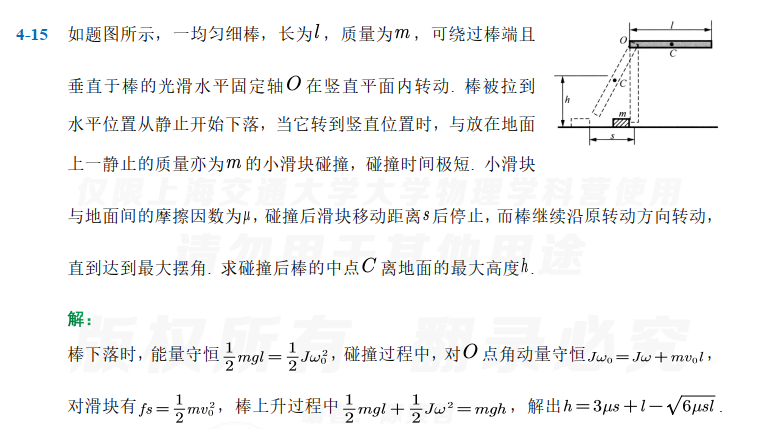
弹性碰撞
Jω1=Jω2+LmvB21Jω12=21Jω22+21mvB2
圆锥体 R,h,J,表面有浅槽,令 ω0 转动,小滑块 m 由静止从顶端下滑,不计摩擦,求滑到底部滑块相对于圆锥体的速度、圆锥体角速度。
对竖直轴的角动量守恒、竖直方向的角动量守恒
因为重力方向始终垂直。
Jω0=(J+mR2)ω
小物块的速度可以分解为相对圆锥运动和圆锥体相对地的运动
u+ωR
然后叉乘 r,发现 r×u=0。
系统的机械能守恒
小物块的终速度的大小:
u2+ω2R2
因为是垂直的。
21Jω02+mgh=21Jω2+21m(u2+ω2R2)

-
机械能守恒,刚开始和结束时刻总动能都为 0.
-
令绳上的力为 mgsinθ。
或者寻求 v−S 关系,求导得到极值。
还是利用机械能守恒,
mgSsinθ=21kS2+21mv2+21Jω2
利用绳和滑轮无摩擦,得到
ω=v/R
这时物块的加速度为0,因此滑轮两侧的绳拉力一致。
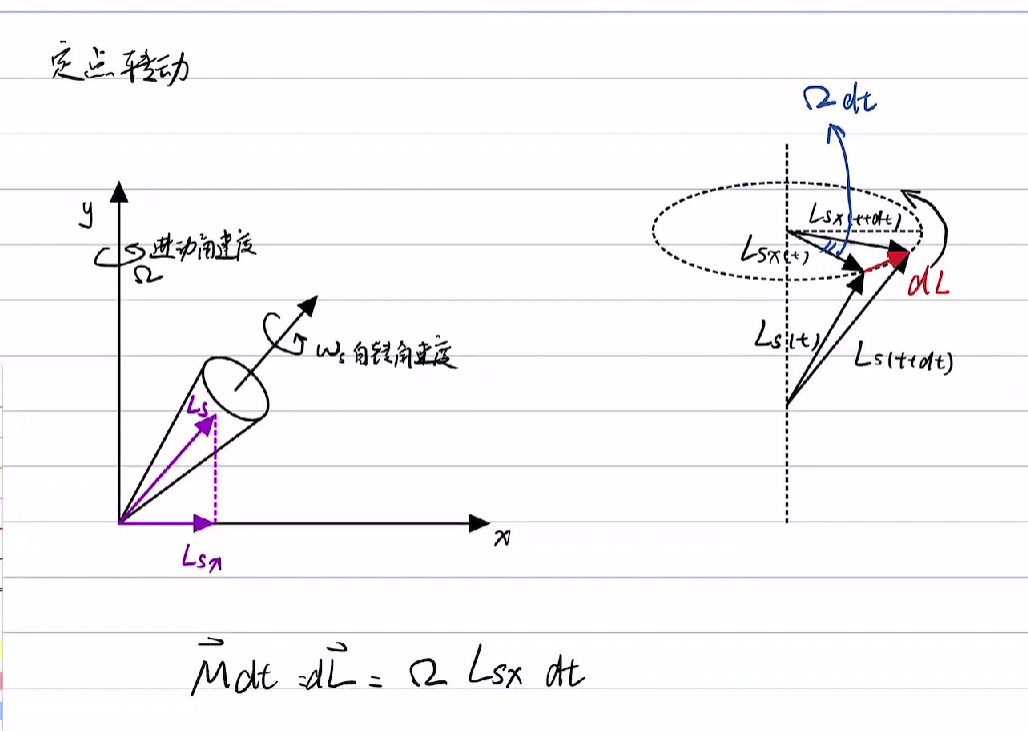
回转仪 进动
刚体的旋转分为两个成分,高速自转、进动。
Rotation, Precession, Nutation.
当 dL//L,L 的方向不改变,当 dL⊥L,该如何?
回转仪:由厚而重,形状对称的刚体绕对称轴高速自转的装置。
当 M=0 时,角动量保持恒定,定向回转仪。
陀螺 设陀螺质量为 m,以角速度 ω 自转,力矩为
mgrsinθ
还有绕自身旋转的角动量,得到
dL=M⋅dt
dL⊥L
L 时刻改变方向而大小不变。
进动角速度的计算
几何关系
∣dL∣=∣L∣sinθ⋅dφ=Jcωsinθ⋅dφ
物理规律,dL=M⋅dt。
∣dL∣=∣M∣⋅dt=mgrsinθ⋅dt
进动 Precession 角速度
Ω=dtdφ=Jcωmgr
ω 越大,Ω 越小。
ω 改变方向,L 朝向向下,Ω 方向相反。
一般来说,转动刚体对参考点的角动量和角速度是不平行的,但是如果刚体轴对称质量分布,那么就是平行的。
杠杆回转仪


还是推公式罢!
dL=Ldφ=Mdt
L=Jcω=41md2ω.
Ω=dtdφ=LM=41md2ωmgl=d2ω4gl
刚体的平面运动
刚体做平面运动,都可以转化为随质心平动和绕质心轴的转动。
∑Fi=macMc=Jcα
分解任意质元的速度:
vi=vc+ω×ri
动能也可以进行分解:
Ek=21mvc2+21Jcω2
其中 M=Mc+MI,其中 MI 是惯性力矩
MI=i∑ri′×(−Δmiac)
然后得到 MI=0。

质心运动定理:
ac=mF
Fd=Jcα⇒α=JcFd=ml212Fd


纯滚动的条件:s=φr,v=ωr。常规方法
mgsinα−Ft=macFN−mgcosα=0Ftr=Jcβ
最快求出角加速度:以接触点 P 为参考点
JP=52mr2+mr2=57mr2
只用考虑重力的力矩:
β=mgsinα⋅r/JP=5gsinα/7r
推出加速度:
ac=rβ
得到时间:
Δt=ac2h/sinα
然后求出速度和角速度。
能不能用机械能守恒:
mgh+0+0=21mv2+21Jcω2=21mv2+51mr2ω2=107mv2
因此
v=710ghω=v/r
连滚带滑的情况?v=ωr。

(ω0−Δt⋅β)R=Δt⋅a
ω0R=Δt(a+βR)
Δt=a+βRω0R
vr=1+βR/aω0R
习题